Arduino 控制舵机编程实训(自带Servo 函数)
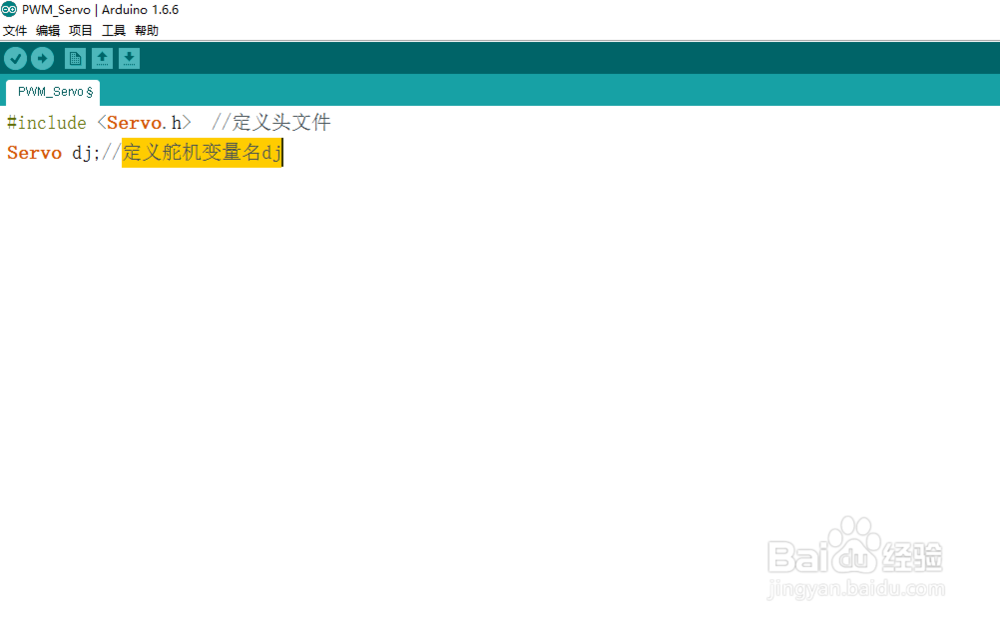
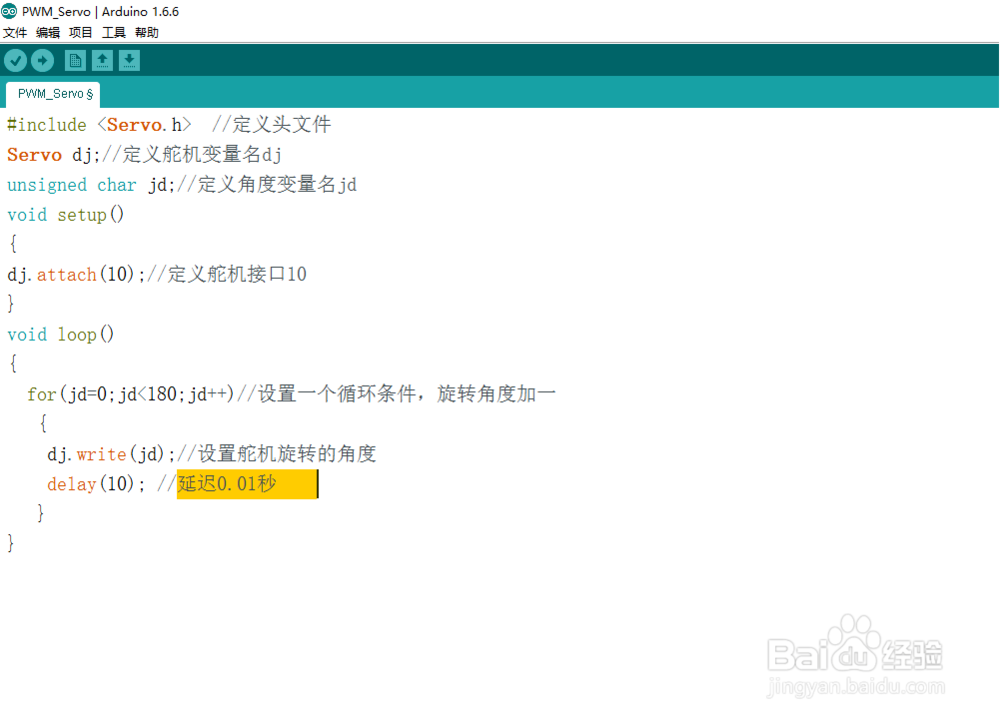
1、定义头文件

2、定义舵机变量名dj
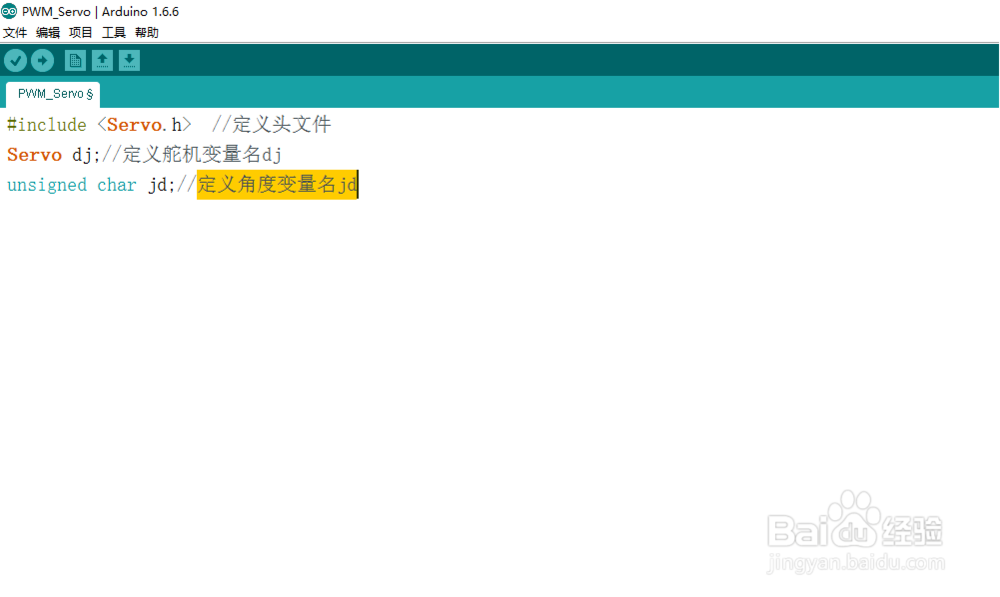
3、定义角度变量名jd
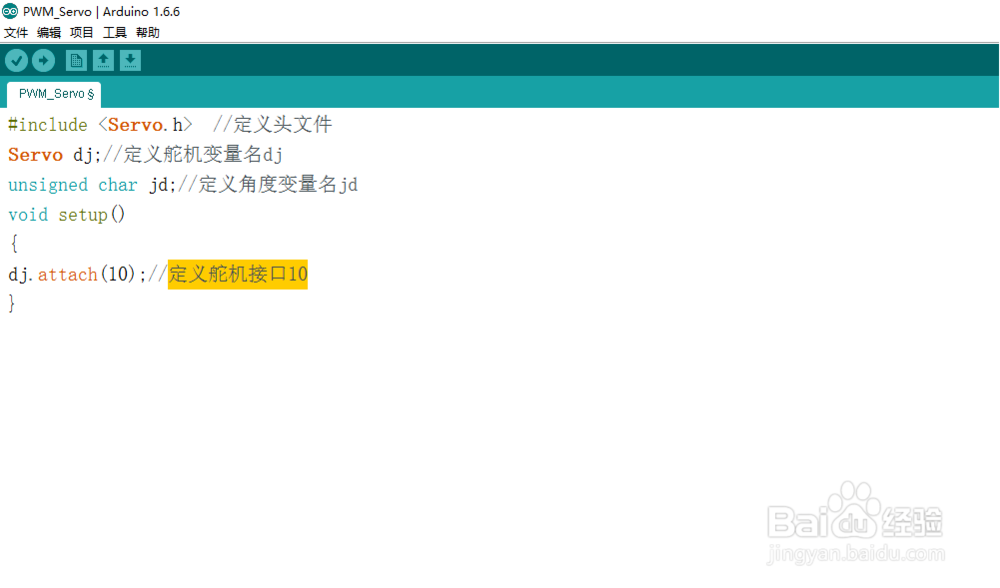
4、定义舵机接口10
说明:attach(接口):设定舵机的接口语句,数字9 或10 接口可利用。
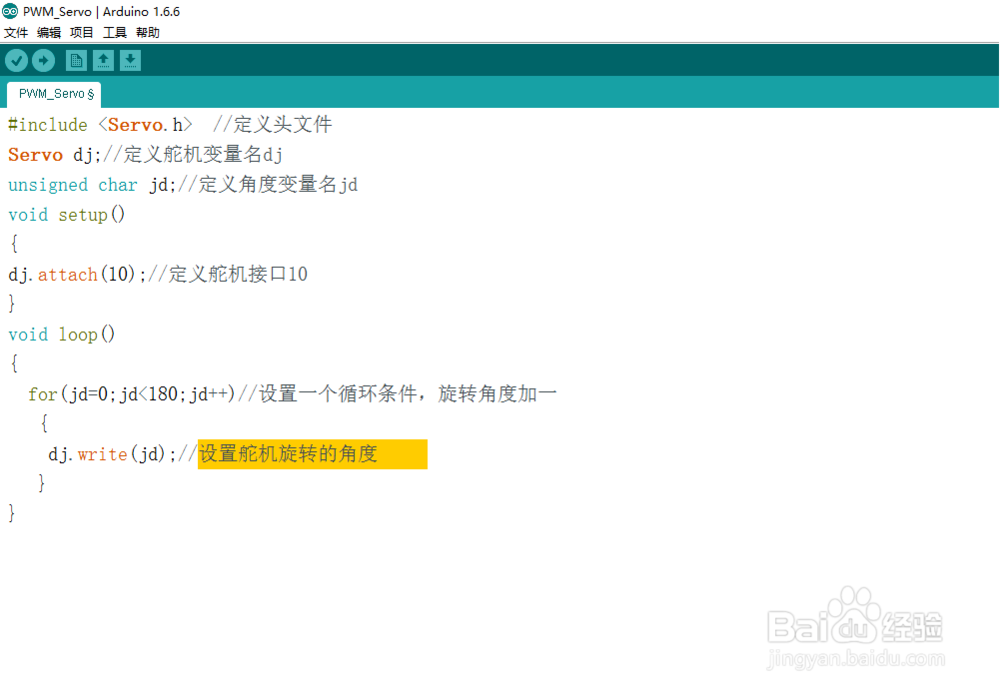
5、设置舵机旋转的角度
说明:write(角度):设定舵机旋转角度的语句,范围是0°到180°。
6、延迟0.01秒
阅读量:124
阅读量:120
阅读量:182
阅读量:173
阅读量:158
1、定义头文件
2、定义舵机变量名dj
3、定义角度变量名jd
4、定义舵机接口10
说明:attach(接口):设定舵机的接口语句,数字9 或10 接口可利用。
5、设置舵机旋转的角度
说明:write(角度):设定舵机旋转角度的语句,范围是0°到180°。
6、延迟0.01秒